During COVID, I wanted to build a walking robot. It's called the Turducken 2000 because I initially sketched it out to be some sort of amalgamation of poultry...
The bot was powered by a Raspberry Pi and external battery pack in the head unit, and moved using 3 servos per leg (Hip, Knee and Ankle Joints). It was obviously limited in range of motion (with only 1DOF per joint), but was able to do some basic movements.
You can see the robot in action in this Youtube Video of the Turducken 2000.
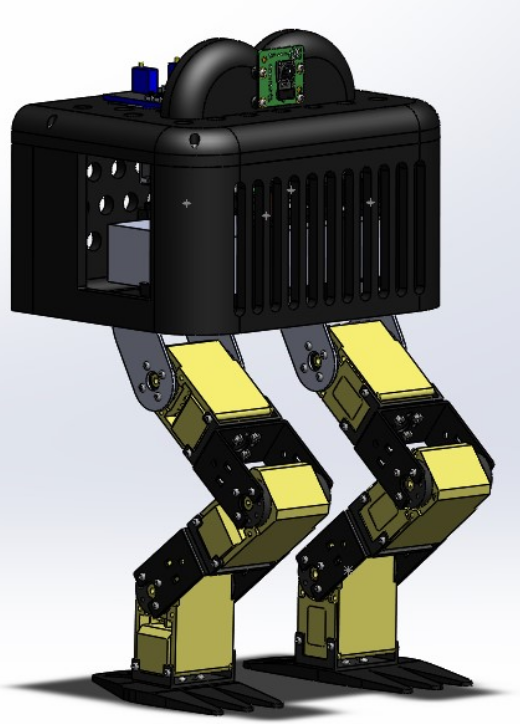
 3D Render of fully modeled robot, and side view of fully assembled robot.
3D Render of fully modeled robot, and side view of fully assembled robot.
I measured the servo angles of each joint of the bot at every stable position (standing, forward lean, backward lean and squat), and created state machines to transition the robot between standing, squatting and crouching.
For movement, I needed to fine tune the angle measurements to give smooth transitions between states, and then set up URDF to simulate walking movement before testing on the physical robot. I didn't have enough time to increase walking performance by optimizing walking gaits, and wrapped up the project when it was able to walk (mostly shuffle) without falling on its head.